
Fout in e-mailformaat
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


De specifieke strik van de servo
2024-04-29 16:44:08
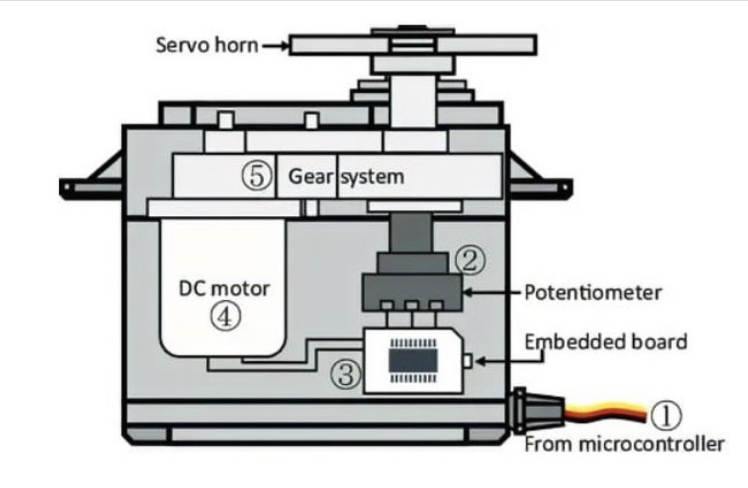
De specifieke structuur van de servo is als volgt:
①: Signaallijn: ontvang het besturingssignaal van de microcontroller;
②: Potentiometer: het kan de positie van de uitgangsas meten, die tot de
Feedbackpart van het hele servolechanisme;
③: Interne controller: het signaal verwerken van de externe regeling, het besturen van de motor en
Het verwerken van het feedbackpositiesignaal is de kern van het gehele servopechanisme;
④: Motor: als een actuator, hoeveel snelheid, koppel, positie wordt uitgevoerd;
⑤: Transmissiemechanisme/servosysteem: dit mechanisme schaalt de uitvoerslag van de
motor naar de uiteindelijke uitgangshoek volgens een bepaalde transmissieverhouding;
De uitgang van de servo wordt geregeld door een PWM -signaal naar de signaallijn van de servo te sturen.
①: Signaallijn: ontvang het besturingssignaal van de microcontroller;
②: Potentiometer: het kan de positie van de uitgangsas meten, die tot de
Feedbackpart van het hele servolechanisme;
③: Interne controller: het signaal verwerken van de externe regeling, het besturen van de motor en
Het verwerken van het feedbackpositiesignaal is de kern van het gehele servopechanisme;
④: Motor: als een actuator, hoeveel snelheid, koppel, positie wordt uitgevoerd;
⑤: Transmissiemechanisme/servosysteem: dit mechanisme schaalt de uitvoerslag van de
motor naar de uiteindelijke uitgangshoek volgens een bepaalde transmissieverhouding;
De uitgang van de servo wordt geregeld door een PWM -signaal naar de signaallijn van de servo te sturen.
Neem contact met ons op
PRODUCTTAGS
Neem contact met ons op
Geef uw vraag in het onderstaande formulier. We zullen u binnen 24 uur antwoorden.